








造众城,哀(I)其不争,一(E)路艰辛,舍(S)死(S)逢生?")

历史级「超级跑车」")











撰文:徐鸿鹄 | 排版:王晓峰 |编辑:芃娘娘
⚠ 全文总长约含8,500字,预计您的阅读时间为20分钟。
公众号:几何四驱 (ID: GeometryAWD)
「WRC」
是雨林,雪地,沙漠,草原,
山丘,泥泞路面上的终极决斗!
世界上最严酷的赛事之一。
这项赛事,不可避免地与「AWD四驱」结下美丽姻缘。
奥迪 Quattro:一路改写WRC赛事规则的传奇。
蓝旗亚 Delta: 46个WRC分站记录的缔造者。
三菱 EVO:公路赛道里的传说,操控之王。
斯巴鲁 WRX:三度WRC总冠军。
……
给你一条路,周围全是树。
飞驰在赛场的,不仅是四驱车,
也是我们青春的记忆,
更是我们懵懂时对于激情和梦想的初体验!
「四驱技术」并非三言两语能够概括。
为了了解「四驱之美」,我们需要了解
创立每一项技术的动机和理论基础,
它发展历程里的每一个技术瓶颈和痛点。
历史,就带给我们这样一个视角,
为我们展示出理论界的推陈出新,
和工程界的手忙脚乱的时代印记,
让我们体会到思考和创造的艰难和伟大。
三菱,奥迪,斯巴鲁,保时捷…
在这一章里,我们将深入回顾四款四驱产品,
看看这些品牌的背后都有哪些奇妙和天才的想法

它无疑是世界最优秀的四驱全时技术的代表车型!
EVO X在弯道的表现无与伦比,快过前辈,
也快过那个年代几乎所有的竞争对手!
在三菱当年面对极端财政困难时
仍然能够生产出EVO X
这已经是个奇迹了!
在欧美的四驱技术开发现场,
谈起发明了「三菱 扭矩矢量系统」的泽赖教授
无人不知!
带有「扭矩矢量系统」中央差速器的四驱技术
可谓是地表最强驱动系统,
它也是三菱最最重大的企业财富!
领先世界至少10年的技术优势,
令其领先地位牢不可破!
早在1934年,
三菱就正式完成了首部四轮驱动汽车 – PX33。

它是亚洲生产的第一台四驱车!
至此三菱在四驱技术上的开发与研究就从未停止。
放眼当今世界,
不拘泥于发动机扭矩大小
实现左右轮之间自由交换扭矩的正式扭矩导向机构的
只有三菱汽车、Audi、BMW三家公司。
三强之后是日产配备了有条件限制的
可进行导向控制的轻型小型廉价系统。

以Audi · Quattro为开端的公路四驱车,
即便在恶劣条件下
也能够给予汽车安全和高速移动的能力,
跟在三菱身后穷追不舍!
汽车操控是平衡的艺术
三菱Evolution X强大的地方就在于
它实现了四轮驱动力和制动力的独立精确调控!
它兼顾了车辆的驱动性能
和过弯能力和车辆稳定性。
达成这一目标并不容易:
它将ACD*、AYC*、ASC*和ABS*
各种车辆电控系统综合控制起来
才实现了这一历史性的跨越!

ACD 主动中央差速器,用来平衡前后轮驱动力
AYC 主动横摆控制,用来平衡左右后轮驱动力
ASC 主动稳定控制,用来控制发动机功率和车轮制动力
ABS 车轮防抱死,用来确保制动时车轮的地面附着力
在过弯时,ACD 和AYC密切配合,
能给外侧后轮更多的扭矩,
从而大大提高过弯的极限。
即便发生响胎,EVO X似乎才只刚刚进入状态,
仍能对驾驶者的操控作出准确的执行,
只是偶尔能体会到ASC的介入,
降低了弯中的车速。
如果想获得更有运动感的驾驶体验,
那就关掉ASC系统吧,
你能获得超临界状态的驾驶感觉。
然而EVO X的ASC系统在关闭状态下
并不是完全不起作用,
此时ASC将只是控制4轮的制动力分配,
而不限制发动机牵引力的输出。
也就是说通过有技巧的油门控制
仍然能使车辆保持在极限状态下的车速。
在三菱的不懈调教努力下,
几乎包含了所有的已知路况,
这是前所未有的性能提升。

EVO X开起来简直就是一件艺术品,
可惜停产后,地表最强四驱系统再无升级!
“我已离开,后会无期!”

征战80年代前期WRC的Audi Quattro 小壁虎
就曾以前置前驱的主布置形式
实现前置后驱车的过弯姿态!
这是轮胎抓地力,前后驱动力平衡分配
带来的奇妙体验!
奥迪的努力经历了几代技术变迁
最初期的Audi・Quattro采用开放式差速器
前后驱动力分配比为50 : 50
但开放差速器的弱点在于:
当有轮胎离地空转时,
所有的车轮会失去驱动力。
随后的改进是将轴距缩短,
轮距扩大了的Short Quattro,
也提高了转弯性能。
在1985年的WRC中,
配合发动机功率的提升
Quattro再次将轮距扩大,
并在B级车的赛场里竞技!

到了21世纪,
托森差速器被广泛应用在Audi Quattro四驱系统当中。
虽说同为奥迪的Quattro,
但在A3(横置FF主驱)和A4以上(纵置FF主驱)的级别
四驱系统的构成却截然不同!
Audi A4是一款前置前驱车!
而运动型的S4和纯运动型的RS4
则匹配了更复杂的Quattro四驱系统!
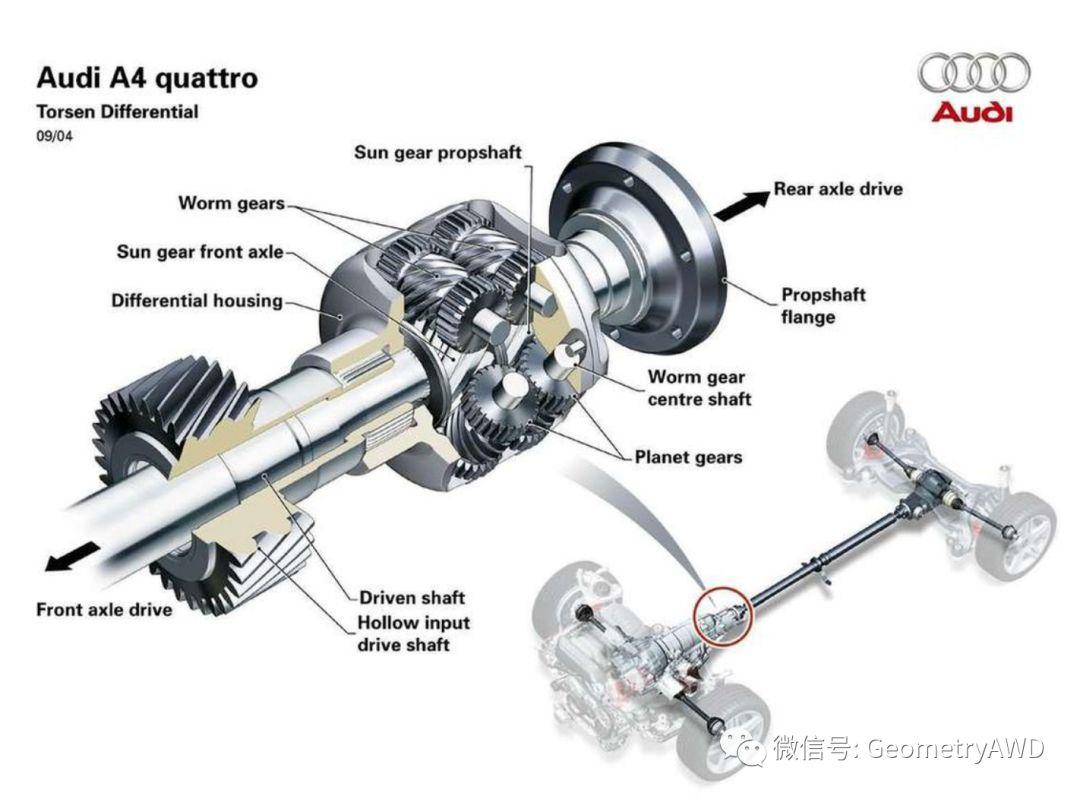
经过仔细研究和不断完善,
Audi在传统4WD使用的中心差速器基础上
又融入了电子控制的扭矩导向技术。
发明了新式的 “冠状齿轮式中心差速器”
并用在了Audi S4/RS4上!
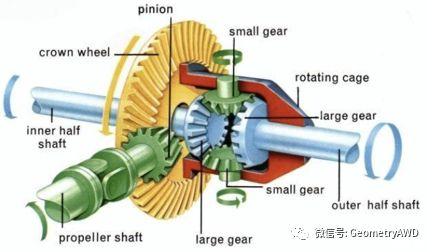
装在变速器输出轴上的4个行星齿轮,
分别被夹在连接前后车轴的2个冠状齿轮之间,
构成差速齿轮!
2个冠状齿轮的有效工作部分(齿接触部分)
直径各异,齿数也不同,
由此产生前后轮的扭矩分配比差异(前40:后60),
此外,后轮用的冠状齿轮背后还配有差动限制离合器,
从而进行差动限制。
这一结构继承了托森差速器的优点,
但是构造却焕然一新,
让前后扭矩分配比不对称,
成功实现了构造简单、小型轻量化。
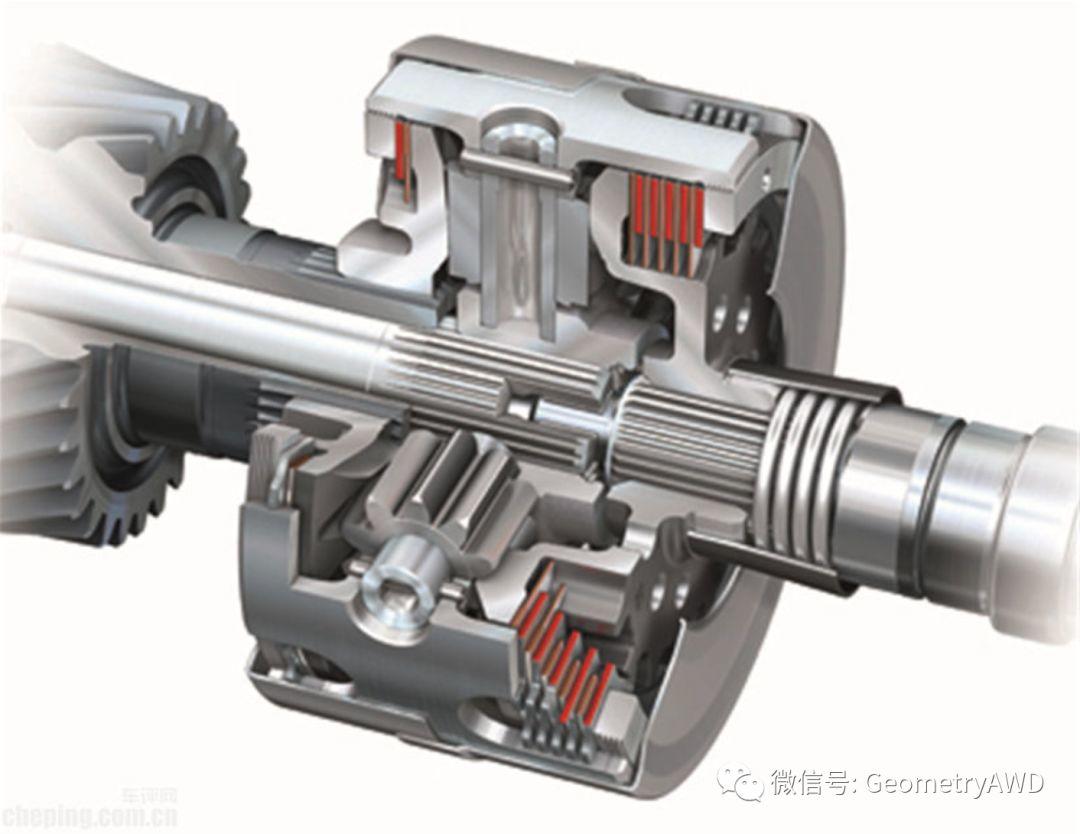
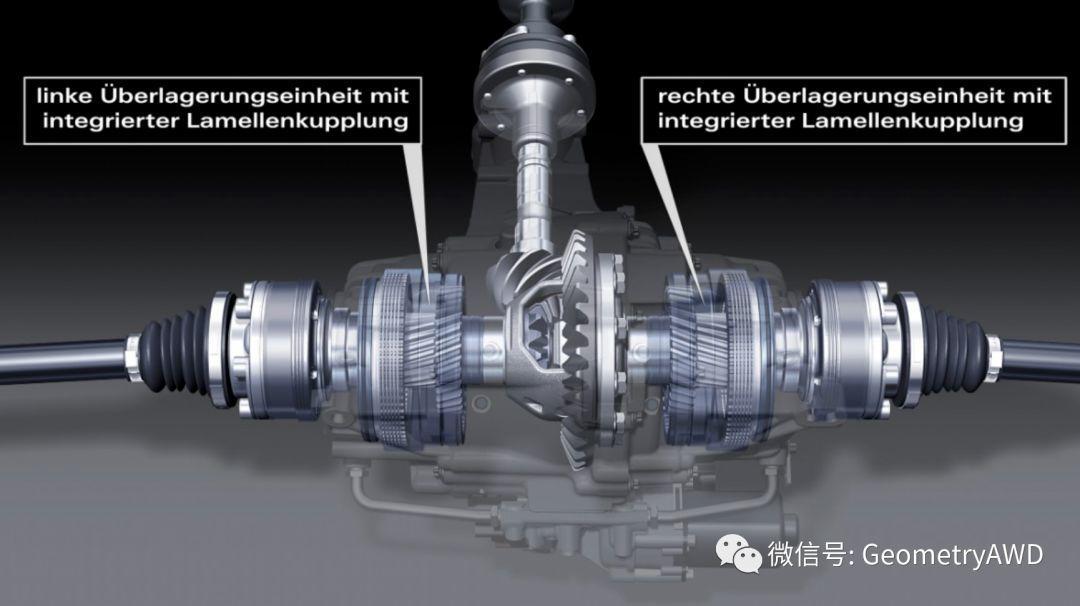
同时,S4还配备了运动型差速器,
在传统差速器的基础上
驱动轴两端各添加了一套独立的增速齿轮机构,
增速齿轮通过电控离合器来实现控制。
借助于电脑和传感器,
抽取横摆率,横向加速度和方向盘角度等数据,
进行更加精准的差速控制。

这种积极介入“转弯”控制的运动型差速器
在车辆转弯时,外侧的增速齿轮配备的离合器接合
驱动力通过差速齿轮传递给增速齿轮,驱动轴被增速
同时内侧的驱动轴则因差速齿轮的作用被减速
一增一减
巧妙地利用了前后车轮的抓地力提高转弯性能。
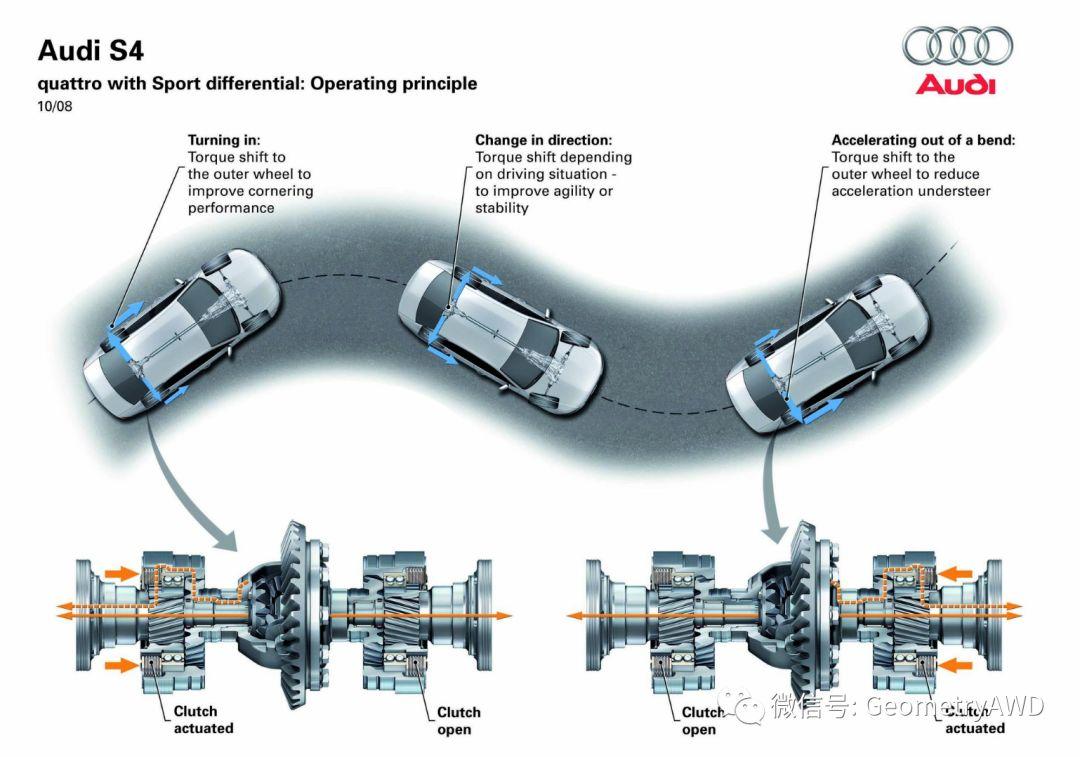
S4初始的前40:后60的扭矩分配比
可以根据情况
在前15:后85~前70:后 30的大范围内变化。
由于是机械式控制,所以没有迟滞反应。
转弯时,外侧车轴增速的同时也增加扭矩的分配。
重达1.8 t的S4惊人的轻快,
可以快速改变行驶方向,
显著地提高了所有路面的转弯性能,
扩展了驱动范围,
易于在低μ~高μ的广大范围行驶。
接近冰面的极低μ路上转弯过程中轻轻抬起加速踏板,
汽车尾部不向外甩,
而是前部仍然沿着转向方向动作。
当稳定性控制设定为ON时,
姿势将要紊乱的时候,
会适时启用
介入时机和介入量的拿捏得十分巧妙。
通过巧妙调和混合在一起的机械控制与电子控制,
S4诠释了4WD独有的世界观,
老铺演绎出惊人的表现!
孪生的斯巴鲁・WRX STI是
可以与三菱・Lancer Evolution X比肩的!
它也是领先世界运动型4WD的代表车型!
搭载了最尖端的4WD系统:DCCD
成为日本称霸世界顶级赛场的秘密武器之一!

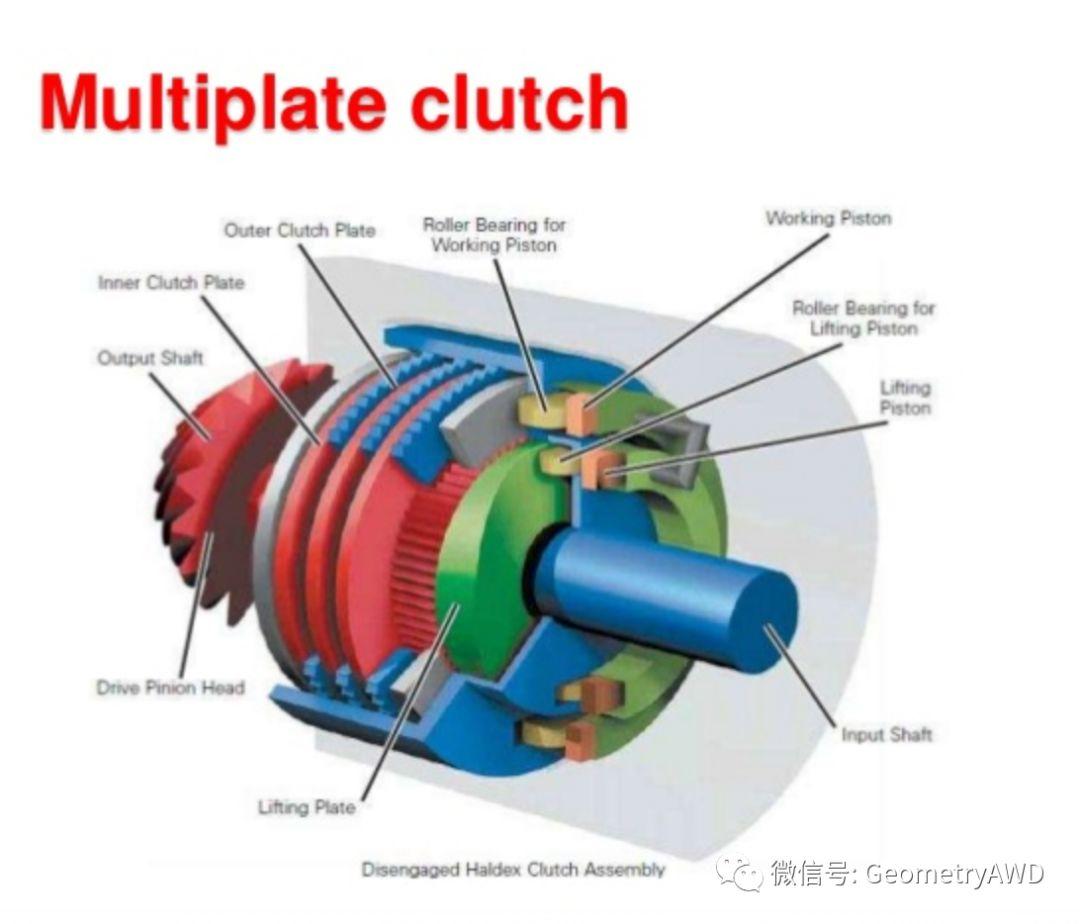
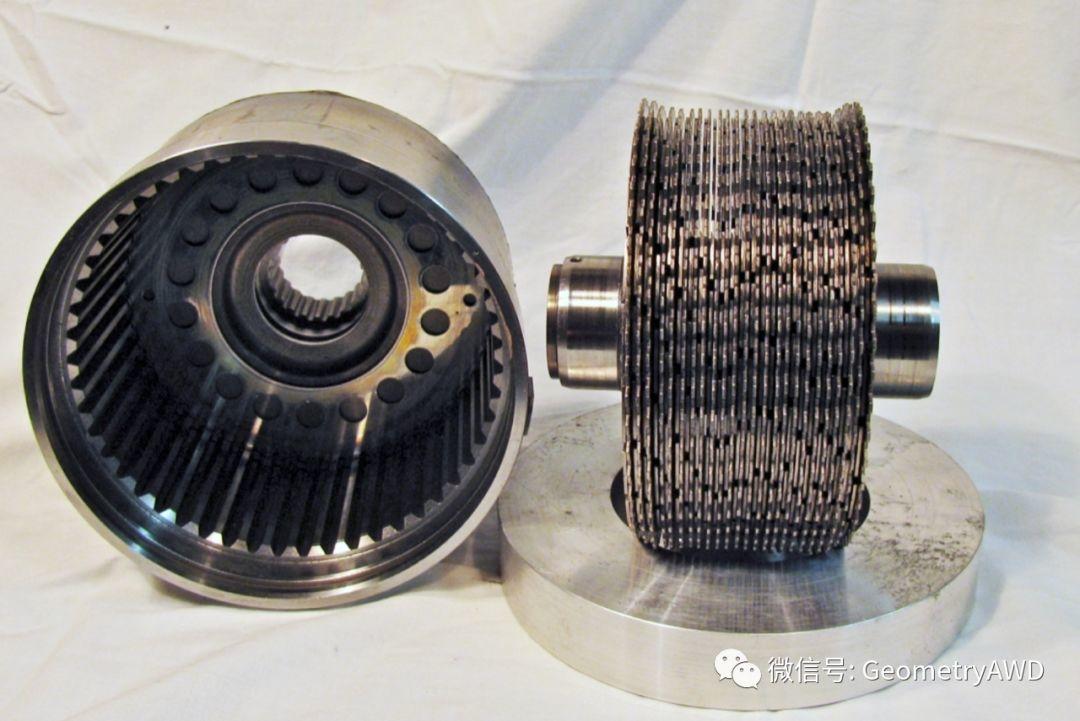
「DCCD」
就是在行星齿轮的中心差速器上
组合了电磁线圈控制的多片离合器
和机械式的凸轮控制机构,
实现差动限制控制,
由此向前后轮分配驱动扭矩。

斯巴鲁称其为 “ 驾驶员控制 ”
自动模式可以检测方向盘转向角,横摆率,横G值和节气门开度
实现调节差动限制机构的功能!
手动模式也能够达到同样的目的,
驾驶员根据路况和自己的技巧改变车辆的操控特性,
非常灵活,充满了驾驶乐趣!
前41 : 后59
是根据汽车的转向特性给出的最合适的比例!
最大的设定范围是35 : 65,
可以做出后驱车的感觉。
山道上习惯车子带甩尾入弯,
那就要调成35 : 65把扭力转移到后轮去。
如果喜欢四驱车的平稳,
就用默认的41 : 59或50 : 50好了。

车辆基本重量分配属于前置前驱的前重型,
但驱动力分配更加偏向后轴,
因此即使在低μ路面上也能表现出前置后驱车的特性。
此外,斯巴鲁在WRX STI的前后轴上
还分别配备了扭矩感应型LSD和扭矩传递性LSD,
加上DCCD整车一共配有三套差动限制机构!
这是一款专门面向驾驶阅历丰富的行家里手的车,
却似乎并不适合当作大众商品来售卖。
只有请出驾驶技术娴熟,
且能够熟练使用中心差速器“手动”模式的职业赛车手,
才能够随心所欲展现这台车4WD道路超跑的形象!
自由自在地控制不足转向和过度转向,
达成4WD运动性能的巅峰,
这是一部具有古典操控风格的自由战车!

依靠前轮驱动确保稳定性的后轮主驱动4WD!
由于设计造型与911系列及其相似,
你可能会有一种错觉,认为这辆车很精致,
但若把实际车辆放在眼前,
你会为其庞大的尺寸惊异,
似乎比梅赛德斯S级还大。
坐在驾驶席上,这种印象会更加强烈,
你的感觉很对,这是一台车宽达到1930mm
重达2吨的大家伙!
但车子一经开始行使,转动几次方向盘,
体量巨大的印象就慢慢消失了。
当你心情舒畅地沉浸于保时捷特有的操控体验当中
便会觉得车体的动作反应意外地快速精准,
一旦你熟悉了它的脾气秉性,知道怎样操纵了之后,
第一印象也会随之改变!
前轮的驱动
依靠变速器向前差速器延伸的传动轴来传递扭矩
扭矩分配采用传统的电控离合器实现!
后轮则有趣得多
配备了称为ABD(自动制动、差速)的制动控制系统
一旦单侧轮空转,即在空转侧施加制动
从而实现差动限制的作用!

保时捷通过制动控制实现了扭矩导向 :
转弯时只操作弯道内侧的制动器来降低内侧车轮承受的扭矩!
于是,只要单独控制左右后轮制动器
就能获得扭矩导向效果!
实现扭矩导向还需要让左右轮独立增减速,
Audi和三菱是采用增速齿轮来保证的,
保时捷则通过制动系统来间接实现。
制动器的液压控制需要高超的技术,
所以不使用如奥迪S4一般结构复杂的差速器单元,
即能得到扭矩导向效果,
这是保时捷的过人之处!
Panamera 4S在低μ路上驾驶非常轻松,
它给人的印象是,
其驾乘的容易度超乎其外表!
明晰可辨的4WD效果与保时捷特有的操作感,
使人豁然开朗,欲罢不能!
欧洲不同于日本和美国
市区街道边界分明,
积雪地区的坡路附近不太有大量人口居住,
生活区域里需要4WD车的需求并不强烈。
因此4WD和SUV在欧洲往往被看作是小众的“奢侈品”,
能真正实现越野用途的欧洲汽车品牌更是凤毛麟角,
唯有奔驰一家!
追求操控的公路四驱车几乎是唯一有生命力的车型!
Panamera 4WD,不愧为欧洲的名门商品,
是为长距离行驶准备的奢侈移动空间。
即使中途降雪结冰也可以毫不担忧地行驶,
成为专门为有钱人横穿欧洲大陆设计的GT车,
4WD在欧洲市场找到了其存在的意义!
四 驱 知 识 点 TOP 10 全 回 顾
Tips 1
< 犬齿离合器选择式四驱系统 >

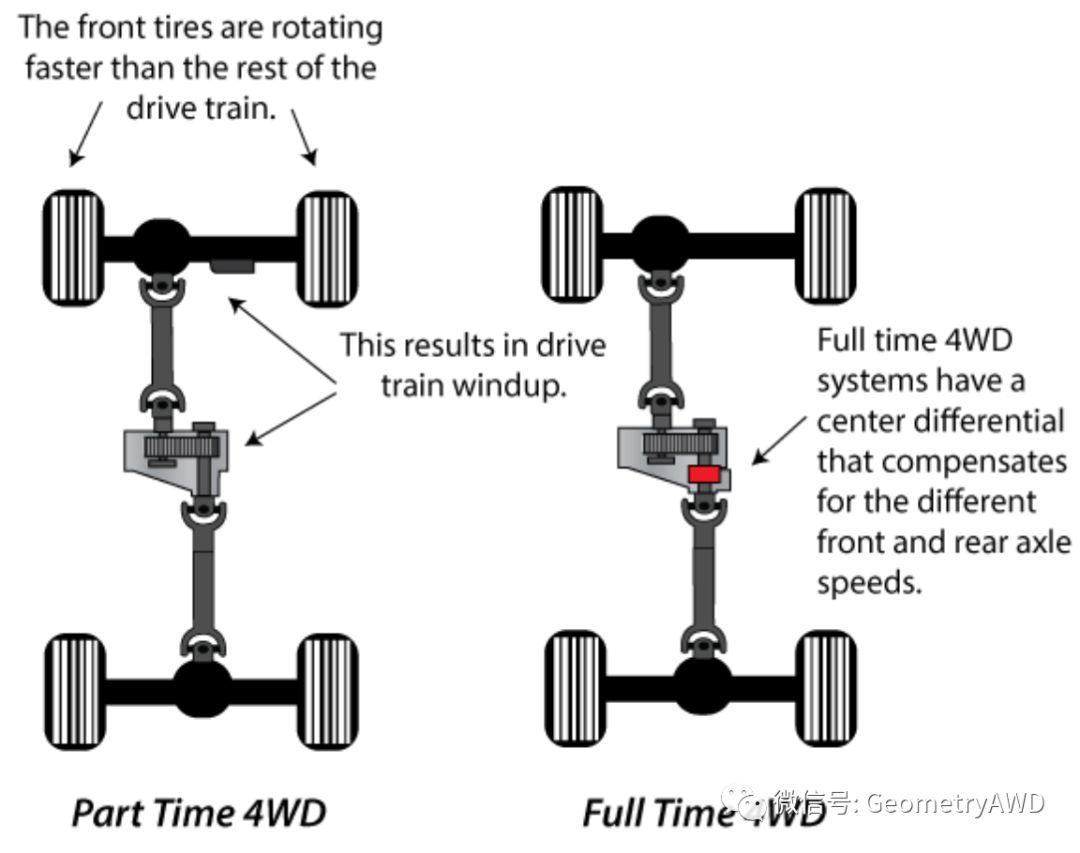
通过由犬齿离合器构成的切断结构
可以切断前轮或者后轮的驱动系统
实现「4WD 」和「2WD 」的选择!
在柏油路进行一般行驶时,
以二驱状态确保车辆转弯性,运动性以及燃油经济性,
并只在需要时切换为四驱模式行驶。

犬齿离合器的弊端是无法进行行驶切换,
操作时需要在停车状态下挂入空挡,
前后轮施加不同转动方向载荷时也存在附加限制:
「两驱」切入「四驱」,可以!
「四驱」切入「二驱」,不行!
吉姆尼在laddar frame(内嵌大梁车身)上
装备了选择式四驱系统。
将健壮的越野车外形拿到了微型汽车的轮廓内,
在某种程度上可以说是最强的生活用四驱车,
平民版的奔驰G。
代表车型:
大发・HIJET
铃木・吉姆尼
吉普・牧马人
90年代,汽车电子革命的爆发,电子行业飞速发展。
传感器的价格降低,
电子控制多片离合器结构的联轴器方案被发明了出来,
主动扭矩分配成为可能,前后轴可通过差动限制装置。
以驾驶信息为基础,通过电脑进行判断,
实现不均衡的扭矩输出。
这种系统允许一定程度前后轴转速差的存在,
灵活性由此得到显著的提升。
而此前只有利用路面反作用力进行四驱切换的被动式方案。
Tips 2
< 限滑差速器 LSD >
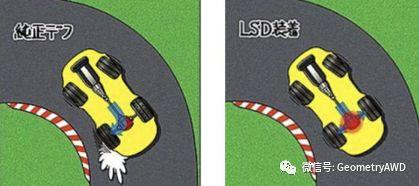
普通差速器有一个弊端:由于车轮悬空而导致空转。
一旦发生类似的情况,
差速器将动力源源不断的传给没有阻力的空转车轮,
车辆不但不能向前运动,大量的动力也会流失,
这时候就需要一种新型差速器来解决这个问题,
这就是「限滑差速器」!
顾名思义,它是限制车轮滑动的一种改进型差速器,
指两侧驱动轮转速差值被允许在一定范围内,
以保证正常的转弯等行驶性能的类差速器。
此外,「LSD」还有更重要的作用:
可以在转弯时将动力转移到内侧车轮,
而非传统差速器一般向外车车轮传递动力,
过弯速度提升的同时车身姿态也可以通过调节动力输出实现精准控制。
机械式「LSD」依照其动力控制的不同方式,
可区分为 1Way 和 2Way 。
1Way是指加油时才能产生限滑动作。
2Way是不论加油或收油都能对驱动轮施以限滑。
此外还有一种1.5 Way的形式:
加油时有作用,收油时起一半限滑作用。
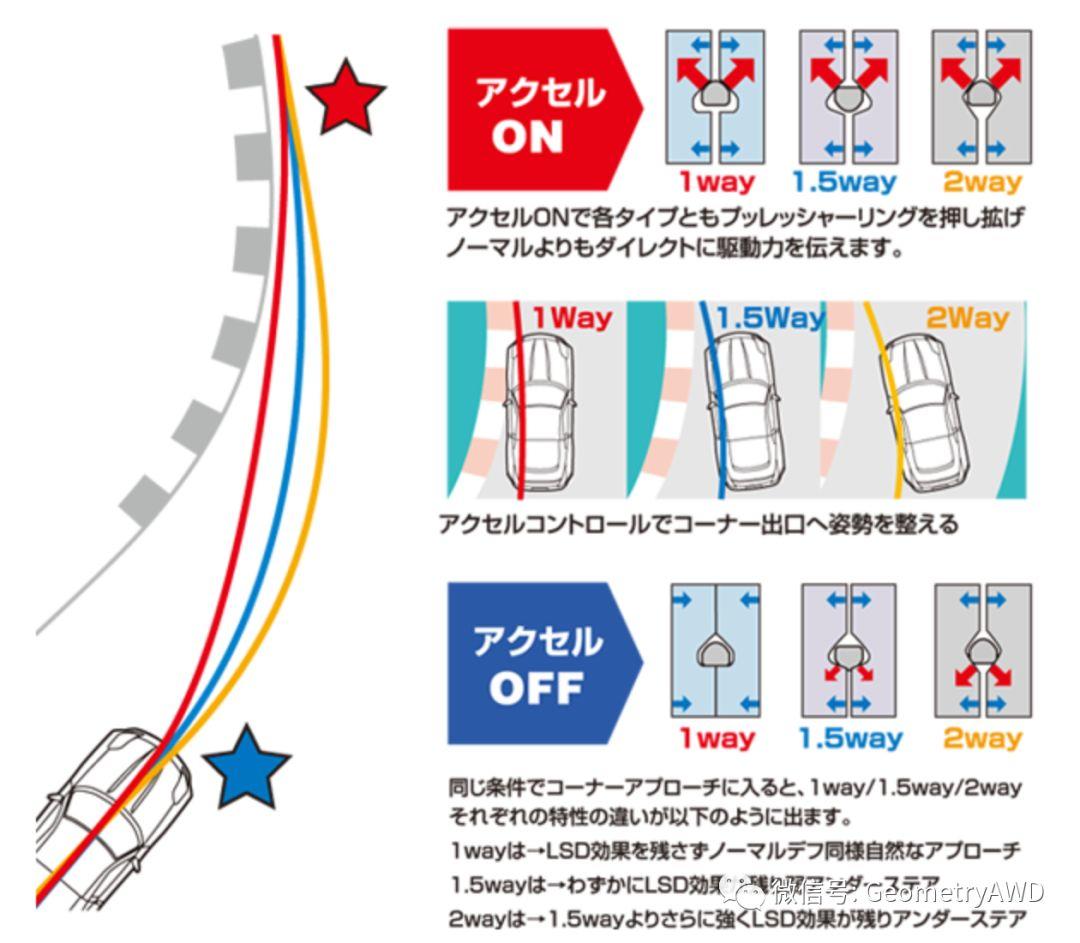
1Way型式比较适用于前驱车及四驱车:
前轮除了负责动力输出外还要负责转向,
而转向的回馈直接传递到驾驶者。
为免除驾驶时的控制困难,
利用1Way的逻辑可以在弯道收油时让限滑力释放,
从而让操控者有较好的手感。
2 Way则广泛用在后驱车上:
更适合甩尾,因为加油及收油皆能限滑,
因此能有效控制车辆循迹方向。
2Way LSD如果装在4WD车上也能显著增加四驱的转弯灵活性,
因此「LSD」往往是改装车的必备武器!
但拿限滑差速器来越野则存在先天不足:
碰到稍微大点的阻力,
极限的限滑能力可能无法有效锁住各个车轮。
在这种情况下,
差速锁或犬齿离合器的结构反而更加可靠。
代表车型:
哈弗・H9
福特・撼路者
奥迪・A4
历史上第一个施展差动限制控制想法的是 – 奥迪
奥迪积极参与WRC,开启了WRC的新时代!
最终,奥迪集科技之大成:
在中央差速器上使用双重行星齿轮,
并在此之上又组装电控多片离合器!
换句话说,
奥迪不只是在中央差速器上增加限滑差速器,
还进行电子控制,一下子向前跨越了两大步!
Tips 3
< 中央差速器式主动扭矩分配四驱系统 >
前后轴进行直连的话,
驱动扭矩的分配应该和前后轮载荷的比率相同,
为让扭矩不平均分配最容易实现的方法
就是引入中央差速器的差动逻辑:
一,为了加速时使载荷向后部移动
二,在转弯时减轻前轮的纵向负担,确保转弯力。
中央差速器对“平衡”的贡献很大,
它能够吸收前轴和后轴间产生的转速差,
并将驱动力不断向4轮传递,
单考虑性能方面恐怕没有什么可以胜过它。
如果施加差动限制的话,
扭矩分配会接近于施加限制的瞬间产生的载荷。
因此,
灵活的差动限制理论上可以生成任意的载荷配比,
这也是车辆运动的基础动力学逻辑。
此外为了解决只装备中央差速器的车辆在任何一个车轮打滑的时候向其它驱动轮传输的扭矩会变为0这个问题,
必须在中央差速器外追加限滑差速装置
主动地控制扭矩分配!
要么是粘性耦合器,
要么是电子耦合器等离合结构,
要么是托森式差速器,
或者是以上结构的组合。
最终的结构会非常的复杂,成本也很高,
不利于降低油耗。
并且向所有驱动轮不停地分配扭矩,
对前后驱动系统的强度是很大的考验,
这些都是高成本的来源。
具备转速差感应型LSD功能的中央差速器的出现
让全时四驱打开了系统通用之路。
这个风潮立即席卷全球!
后轮驱动先驱BMW在第一时间让这项技术落地。
E30 325iX 诞生!
代表车型:
三菱・Lancer Evolution X (翼豪陆神)
奥迪・S4
斯巴鲁・WRX STI
保时捷,斯巴鲁,阿尔法罗密欧快速跟进,
– 液压控制多片离合器
– 电液控制多片离合器
– 电控多片离合器
相继被发明了出来,
它们可以实现不等矩地限制差动。
伴随中央差速器的多片离合器方案越来越复杂,
简化结构的呼声也就越来越高,
于是斯巴鲁和保时捷先后发明了
单纯采用电控多片离合器的控制方式。
中央差速器被排除,
日产GT-R R32就是当时的杰作!
同时,粘性耦合器也开始萌芽,
将多片离合器浸入硅油粘液,
就可以对转速差施加差动限制,
无需电脑参与,
只利用液体的物理特性被动控制。
硅油的特性是:
当出现较大的转速差时,
硅油温度上升粘性增强并直至接近固体,
于是打滑一侧的车轮就和有摩擦力的车轮转速一致了。
1986年,
第二代大众高尔夫采用了这个设计,
本田思域紧随其后。
由于不需要任何控制机构,
因此它的成本可以做的很低。
在日本市场上
微型车也逐渐开始采用。
由于粘性耦合器的使用受到GKN专利的限制,
JTEKT,丰田,马自达
这些日系厂商为降低采购成本
不得不研发出低价格的替代方案,
油泵液压挤压多离合器片构造的方案陆续亮相。
当时的高性能车上也采用了粘性耦合器的方案,
但与成本无关,
只是因为粘性耦合器还有一个奇妙的理论特性:
即使前后轴转速相同,
都不可避免地存在微小的拖拽。
即便直线行驶时也产生了拖拽作用,
向前轴分配扭矩。
这让后部沉重的兰博基尼,保时捷跑车
得以提高稳定性和转弯机动性。
多年之后,
人们发现粘性耦合器也并不是十全十美。
由于扭力分配依靠改变硅油粘性来实现,
因此系统工作存在一定程度的延时,
在高性能车上缺乏极致性能的拓展性。
于是兰博基尼和保时捷又重拾多片离合器方案
应用在自家的前置四驱车型上。
Tips 4
< 前置四驱与多片离合器 >
前置前驱的布局本身在设计上有很大的灵活性。
按照车辆特点可以设定最佳扭矩分配,
进而最大程度地控制汽车重量,
因此行驶燃油效率会很好。
加上采用多片离合器
能够进一步发挥结构重量轻的优势,
这对于跑车而言尤其重要。
当然缺点也不少:
进行30-40km/h以上速度转弯时,
后轮的转速比前轮快,
此时切换四驱模式的话
会诱发动力推头(pushing understeer)。
由于没有中央差速器,
只通过离合器传递扭矩,
改变扭矩分配时,
前后轴将同时产生差动限制。
当完全连接离合器时,
还会出现直连四驱的缺点,
驱动力分配上存在限制。
最后,多片离合器四驱结构
在持续运行中很容易过热,
因此很难担负起高强度的越野任务。
代表车型:
保时捷・Panamera 4S
BMW・X3
日产・GT-R

– 机械式多片离合器
– 粘性联轴节
– 电子控制式离合器
总有其中一种形式的差速限制机构
被应用在四驱系统当中!
进行差速限制时,
前后轴的驱动力分配有一定的改变,
但车轮不再惧怕离开地面,
提升了通过性。
完全锁止时,又成为直连四驱!
Tips 5
< 差速器和差速锁 >

有一个经常与差速器混淆的词汇是“差速锁”
差速锁和差速器比较,作用完全相反。
也就是不让差速器工作,让两侧的车辆转速一致。
有了差速器还不让他工作
为什么要发明这个东西呢?
原因在于带着差速器去越野存在短板:
当一侧车轮卡死另一侧打滑时
动力全部被转移到打滑一侧的轮胎,
汽车就无法前进了。
为了能够脱困
就需要用差速锁将两侧车轮变成刚性连接,
让两侧车轮都得到相同的动力,
这就是差速锁的作用。
代表车型:
Jeep・牧马人
斯巴鲁・WRX STI
路虎・神行者2代
如今我们能在市场上看到的四驱方案:
高性能汽车往往采用电控多片离合器。
实用型四驱方案也几乎完全被
粘性耦合器或液压多片离合器垄断了。
他们都抛弃了中央差速器。
依然固守传统的斯巴鲁,奥迪,保时捷
和真正的硬派越野车仍旧保留了中央差速器,
可靠又稳定,但却巨大而笨重,
当然,我们还会发现一些特立独行的小众四驱产品,
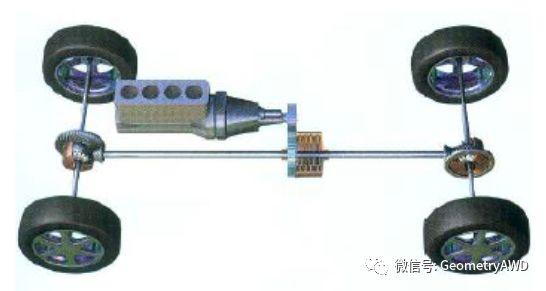
比如特立独行的雪铁龙撒哈拉。
它采用了前后双发动机的2CV4×4
以及混合双动力的四驱技术
和用ESP实现四驱的等效驱动的技术。
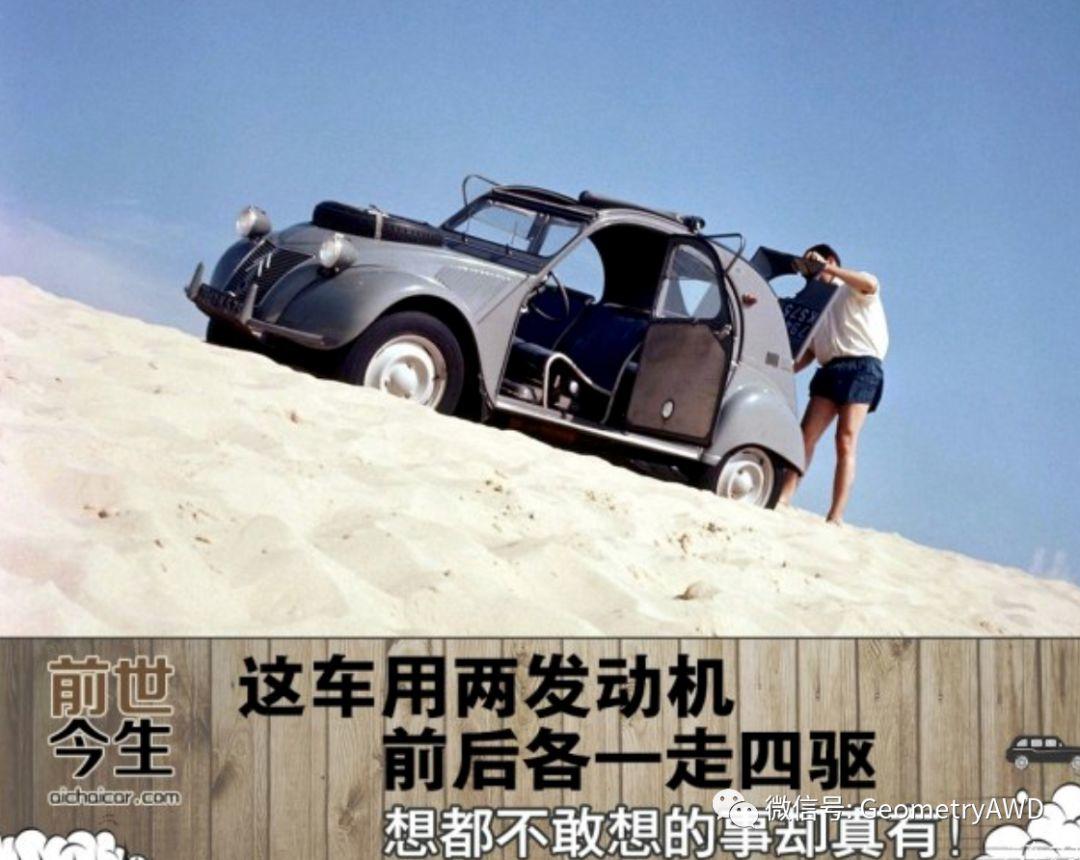
想象力没有极限!
Tips 6
< 双动力4WD >
在混动车型上,
发动机只驱动前轮或后轮其中一侧,
另一侧根据需要作为副驱动轮通过电机驱动,
这个方案也被称之为“e-4WD”。
由于前后轴没有机械的刚性连接,
因此前后轴不会发生转动干涉,
这种方案还可以应用于中置发动机,
后轮驱动跑车的前轴上,
是一种很有发展前景的四驱方式。
Tips 7
< 4WD和ESC控制上的不同 >
都是为了提高稳定性:
4WD瞄准的是加速时的稳定性
ESC的目标则是减速时的稳定性
4WD通过向4个车轮分配驱动力,
抑制驱动力向前轮或后轮过度集中所引起的打滑,
防止由打滑产生转向不足或者转向过度,
也就是说,通过“前进”来确保车辆的稳定。
ESC 则是抑制发动机的输出功率,
使刹车制动力4 轮独立控制,
也就是通过“限制速度”,
来防止车辆失去平衡。
Tips 8
< 托森差速器 >
奥迪的中心差速器一直采用托森式结构!
它利用了蜗轮蜗杆传动的不可逆性原理和齿面高摩擦条件,
当差速器内差动转矩较小时
起到传统差速器的作用,
而当差速器内差动转矩过大时
差速器将自动锁死。
托森差速器就是一个全自动纯机械的差速器,
反应迅速,
在车轮刚一打滑的瞬间就会发生作用。
这种设计也很可靠和耐用,
因为没有传统的自锁差速器所配备的多片式离合器,
也就不存在着磨损,并实现了免维护。
从某些角度来说,是一种非常均衡的设计!
但是托森式差速器结构相对复杂。
重量大,造价也比较昂贵,
值得一提的是,托森差速器并不适合越野。
由于它是自动分配动力的传递,
无法主动进行动力的固定分配,
这一点在越野时将非常被动。
代表车型:
Audi・Q5
丰田・陆地巡洋舰
Tips 9
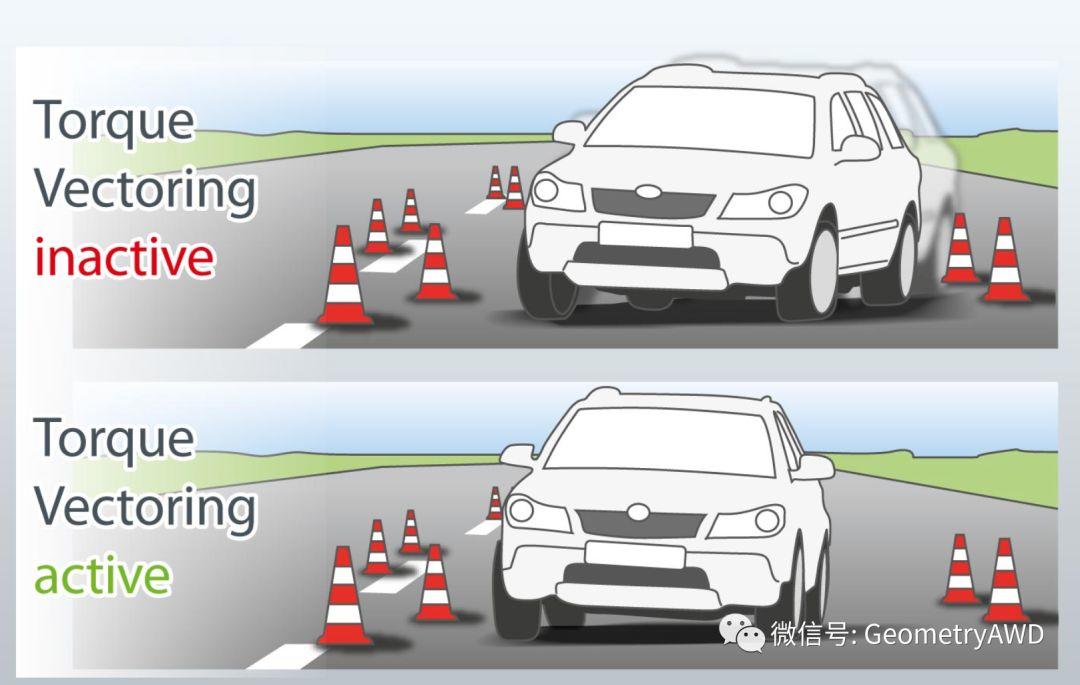
< 扭矩导向 >
一般所说的扭矩导向功能
是指在转弯时在左右轮之间自由交换驱动扭矩
从而产生横摆力矩
通过将更大的扭矩传递到外侧的车轮
让外侧车轮承担更多的驱动力
同时让内侧车轮减少驱动力的负荷
留出余力提供侧向支撑!
这可以显著地减少内外轮的轨迹差,
同时提高抓地力表现,
让过弯动作更加积极。
Tips 10
< 驱动力分配的思考 >
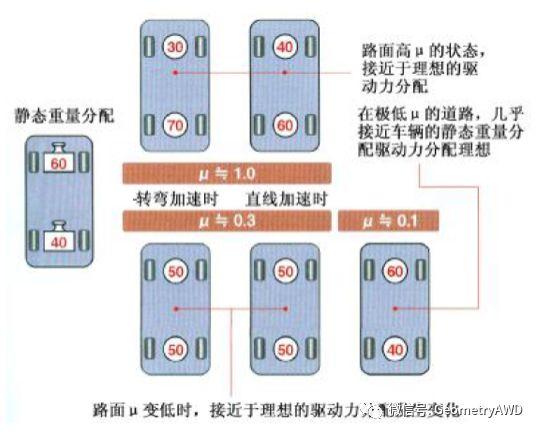
在干燥的柏油路面上,摩擦系数接近于1。
如果一边加速一边转弯,
那么让后轴分配70%左右的驱动力最为理想。
但是,当切换为1g的直线加速时,
前轴应该分配更多的驱动力,
此时仍旧向后轴分配70%驱动力的话,
反而会发生前后轴转速干涉的问题,
车辆反倒不容易转弯。
比较斯巴鲁 WRX STI我们发现:
虽然它的静态前轴载荷大,
但只向后轴分配大约60%的驱动力。
斯巴鲁的想法是
将后轮的摩擦圆尽量在驱动方向上使用,
从而得以让前轮留有余地。
再看三菱 Lancer Evolution X
在高摩擦系数(μ)柏油路上全速行驶时,
会让后轮分配约60%的驱动力。
当在低摩擦路面行驶时,
便增加前轮承载的驱动力。
比如典型的雪铺路面 摩擦系数μ=0.3
此时前后驱动力最佳比例是50 : 50
在冰面上,μ=0.1
前后动态载荷更加接近静态载荷60:40
则是我们的最佳选择!
以上这些驱动力分配目标的实现
都需要经历艰苦卓绝的工程学努力。
除了扭矩分配装置外,
前后轴重分配(发动机布置),
轴距和轮距的比率选择,
悬架行程,侧倾中心,
这些车辆设计规格都需要精细地计算和调整!
对于汽车来说,理论上的抓地力极限就在那里。
四驱技术始终都是从属的角色,
因此对于这项技术要理性地看待。
我们不能过度迷信,盲目乃至于掉以轻心,
认为汽车永远不会失控,
这是典型的本末倒置!
行车安全永远都掌握在自己的手里,
完善的行前检查(特别是对轮胎的检查),
和良好的驾车习惯和意识永远是安全的前提!
「四驱技术」是一门很有意思的学问,
理论离实际不远,也容易到实践中验证,
你会轻易地从中获取某种逻辑的美感!
第一次做这件事的时候,就像搞科研。
第二次,就像搞工程。
第三次,就像一名技师。
第四次,你就成为了艺术家和信徒。
「四驱技术」的故事没有完结,
最完美的产品永远都是:下一个!
特邀撰稿:徐鸿鹄
作者微信:honghu967935
现就职于 蒂森克虏伯 普利斯坦 集团 (Thyssenkrupp Presta AG) ,负责电动转向系统 (EPS) 应用项目的开发和管理。
航天科班,主业汽车电动转向开发,纯正懒散东北人,王小波脑残粉,个人主义走狗 ,AI威胁论煽动者,民科数学家,半吊子程序狗,沉迷理论,日渐消瘦,无一精通。
更多相关文章推荐
-
Part 3 | 无人车安全之战 — AI觉醒的前夜,人类还在沉睡?
关注「几何四驱」
各种高能文章,随后速速就来

本篇文章内容为作者本人原创,展示图片均来自网络,版权归图片作者本人所有!文章未经「几何四驱」或「作者本人」授权不得进行商业性转载。个人性转载请务必注明文章出处。原创不易,感谢理解!
不跟风,拒绝平庸,只做最好的自己。
「几何四驱」 All made in Germany ,Since 2016!











